
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Our approach generates 3D from a single unseen input image (left) while
training on real 3D scans. We show the two rendered novel views of our output (middle,
right). Visible surfaces are colored by the image and occluded ones are colored with surface
normals: pink is upwards and lavender faces the camera. We can observe the occluded cabinet
and floors behind the couch predicted my our approach visible in novel views.
|
|
|
|
|
|
|
Sample results generated by our model on unseen images from Matterport3D
dataset. DRDF is able to recover occluded parts of the floor by the kitchen top, couch, bed. It can recover complete empty rooms behind walls. It also recovers parts of the scene where GT has holes (behind the couch ) |
Overview |
|
We present an approach for scene-level 3D reconstruction, including occluded regions, from an unseen
RGB image. Our approach is trained on real 3D scans and images.
This problem has proved difficult for multiple reasons:
|
Interactive Demo - 3D Models |
|
We present predicted 3D model from our approach using an interactive visualizer. Our model takes input the image and generates the output under DRDF.
Demo Instructions
|
Choose a demo and click on the models to interact! |
 |
 |
 |
 |
 |
 |
 |
 |
| Additional interactive results on examples from Matterport3D and 3DFront |
Interactive Demo - Distance Functions |
|
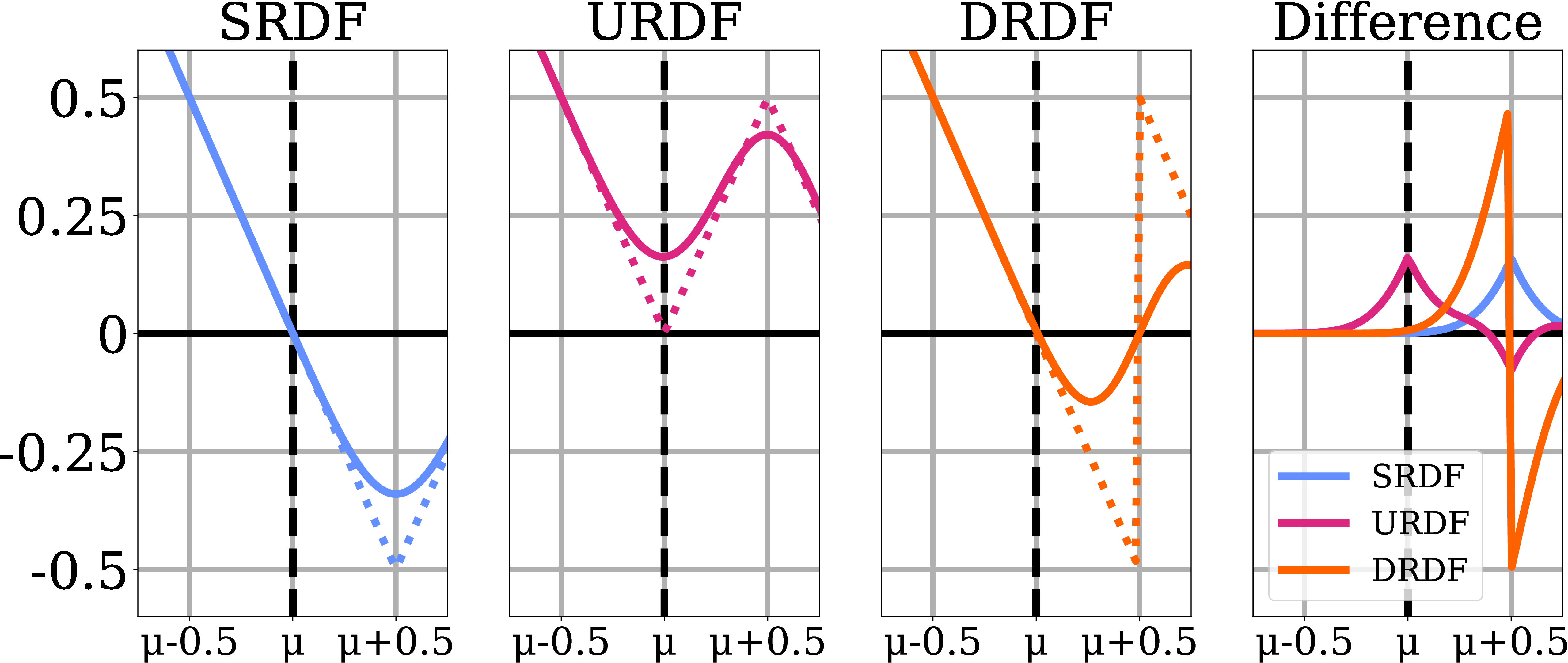
We analyse the behavior of distance functions in 1D case for ray going from -∞ to ∞. This ray intersects at two locations μ and μ+1 along the x-axis. We plot the Signed Ray Distance Function (SRDF),
Unsigned Ray Distance Function (URDF), Directed Ray Distance Function (DRDF) using a dashed line (— — —). We add noise to the intersection location (μ) using the Gaussian distribution and compute the expectation of these distance functions under this distribution (shown with a ——— line).
Neural networks trained to mimic these distance functions with MSE minimizer are optimal when they produce the expected distance function. Expected distance functions lack the crucial properties of distance functions (like norm of gradients is 1). This disparity increases with more uncertainty. Hence, outputs of neural networks do not behave like actual distance functions. For instance, in case of URDF the expected distance function has the highest error at the location of the intersection μ. While the expected DRDF and SRDF also do not mimic the actual distance function their errors tend to occur away from the intersection in case of uncertainty. Using SRDF is not possible for real data as it is not watertight. Our proposed DRDF has low error at the location of the intersection and most of the error is pushed towards the mid way between the intersections. This property of DRDF allows us to recover intersections with a simple inference strategy of detecting +ve to -ve zero crossings along the ray. Below we show an interactive demo of all the distance functions and how they are affected by noise. Move the slider with noise around to see the behavior of expected distance functions with respect to noise |
|
|||||||||||
|
|||||||||||
|
|
Approach |
| We present an approach to train a model to predict 3D from single images using
real 3D scans data and corresponding images. Below we present our core ideas. |

|
Scene vs Ray distances. We
predict distances along the ray instead of distances to the scene. Predicting distances to scenes requires inference beyond
pixels that are along the ray. For instance, in the 2D example, on the left, we show how the nearest points to the red ray change as we travel along the ray. We color the nearest points with the points the on the red ray they correspond. Similarly of the example image of a 3D scene we project points nearest to the ray onto the image and color them with the depth of the point on the ray.
|
|
Choice of Distance Function. We design the
directed ray distance function (DRDF) and compare it in a simple scenario. Suppose the
surface's location is normally distributed with mean μ at its true location and
σ=0.2, and the next surface 1 is unit away. We plot the expected (solid) and true
(dashed) distance functions for the SRDF, URDF, and DRDF and their difference (expected -
true). The SRDF and DRDF closely match the true distance near the surface; the URDF does
not. Interactive demo for this idea is above.
|
|
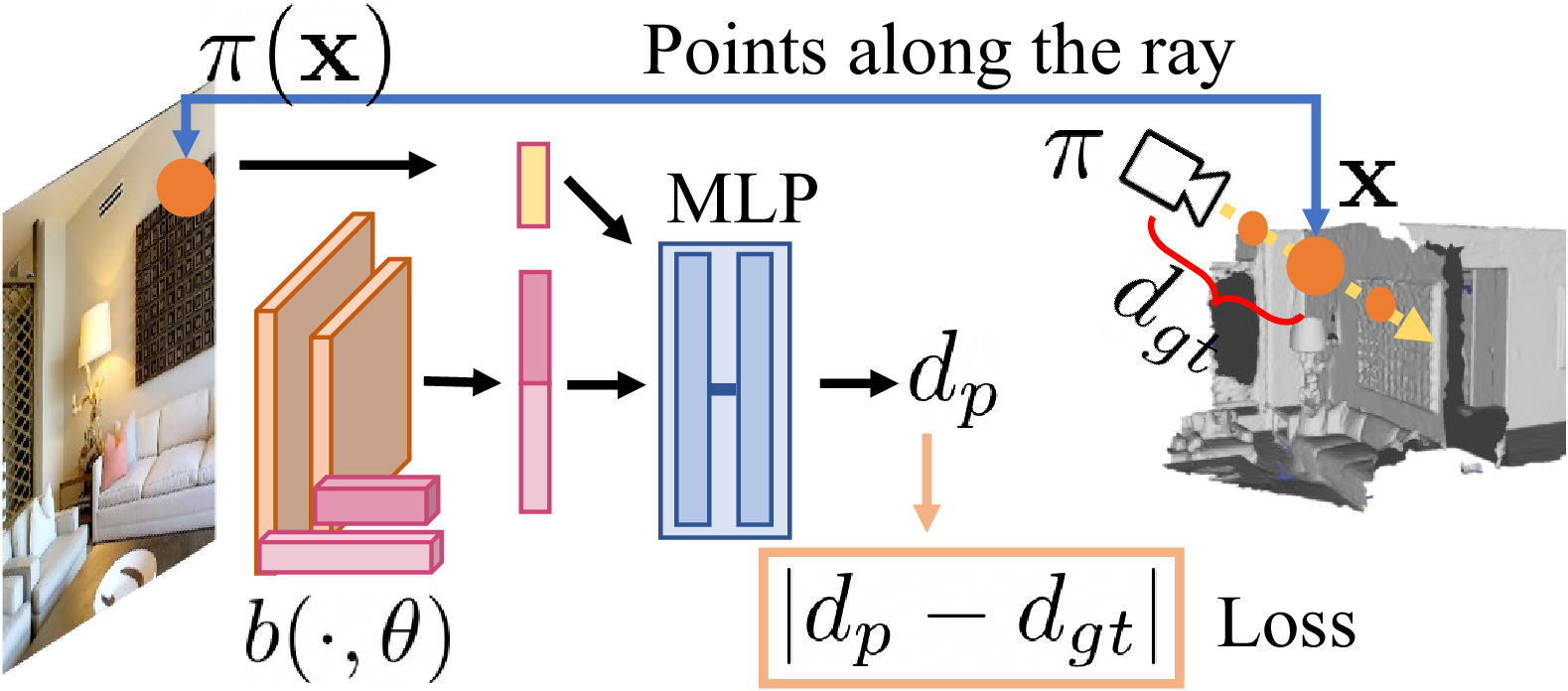
Method overview. At training time, our
model takes an image and set of 3D points along rays and is supervised on the distance to
the nearest intersection via the real 3D geometry. For inference, our model predicts the
distance for each point in a 3D grid, which is then decoded to intersections.
|
Video Results |
| Main Paper Results | Additional Results |
| Supplemental Results |
Paper |
|
|
Code |
|
[GitHub] |
Acknowledgements |
