|
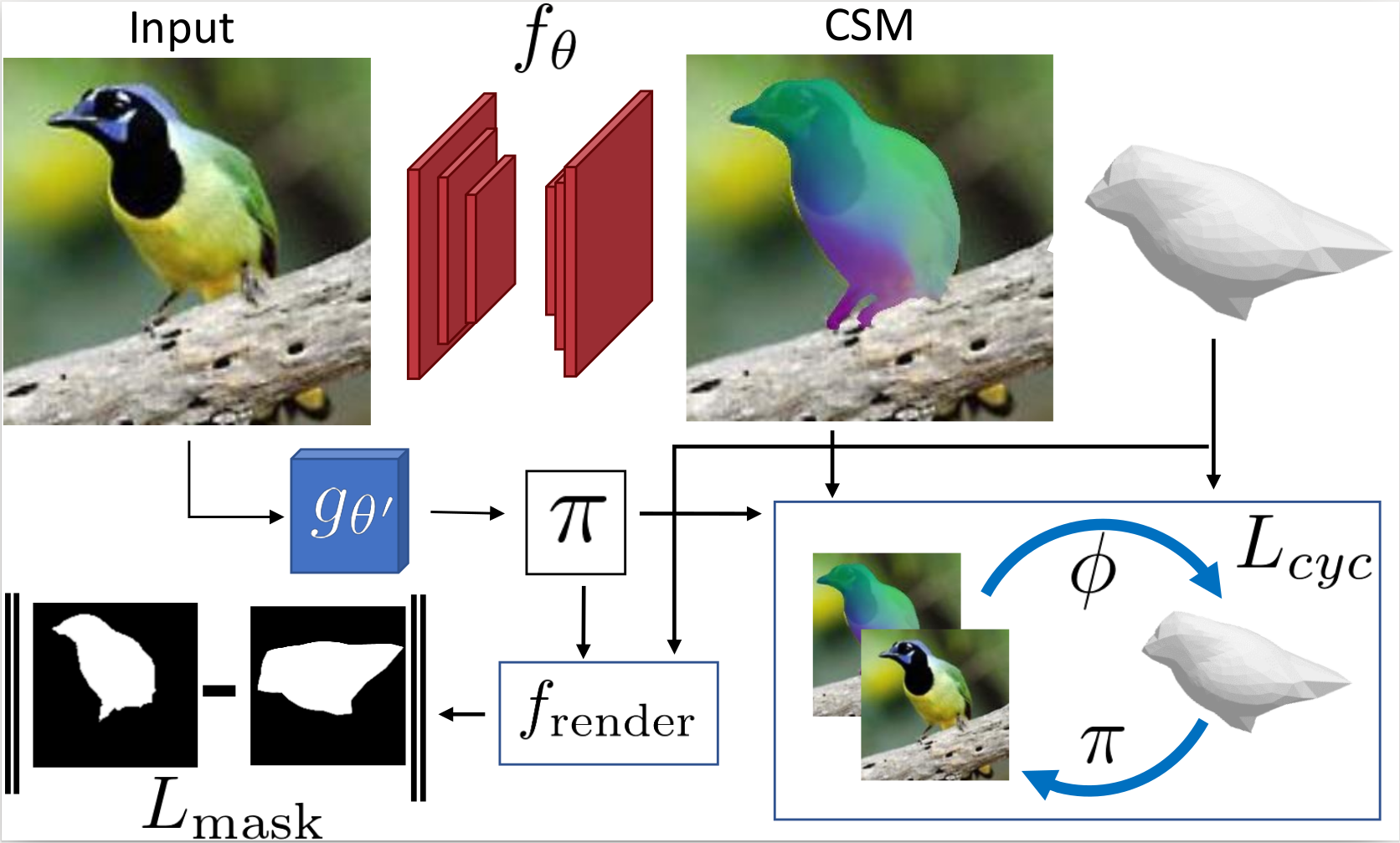
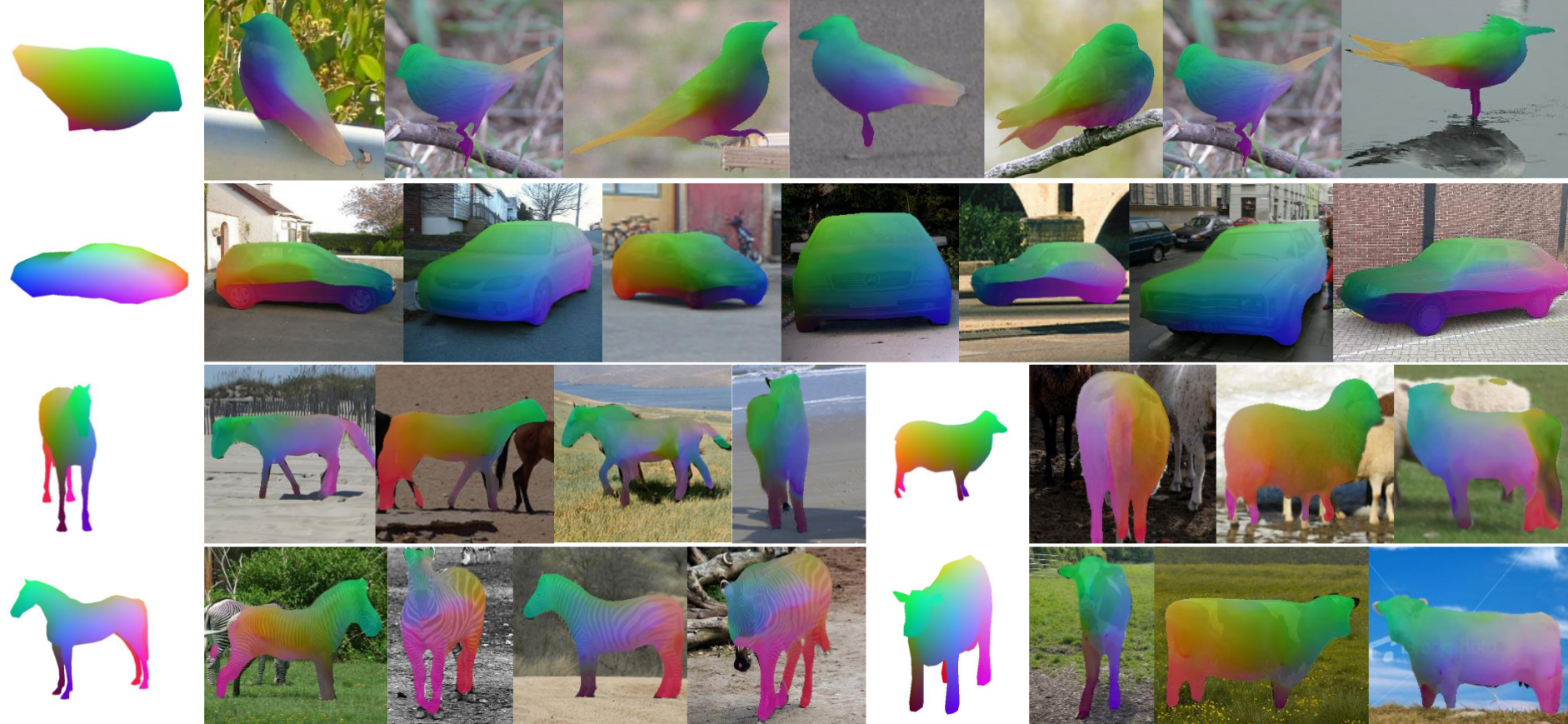
We study the task of Canonical Surface Mapping. This task is a generalization of keypoint estimation and involves mapping pixels to canonical 3D models. We learn CSM prediction without requiring correspondence annotations, by instead using geometric cycle consistency as supervision. This allows us to train CSM prediction for diverse classes, including rigid and non-rigid objects.
|